Souhrn
NASA v prosinci 2025 umožnila roveru Perseverance na Marsu autonomní jízdu na dva dny. Umělá inteligence založená na modelu Claude od společnosti Anthropic analyzovala orbitální snímky a vytvořila trasové body, díky čemuž rover ujel 456 metrů bez intervence z Země. Tento test ukazuje, jak AI může zkrátit čas potřebný na plánování misí.
Klíčové body
- AI zpracovalo snímky z kamery HiRISE na sondě Mars Reconnaissance Orbiter a digitální modely reliéfu pro identifikaci trasových bodů.
- Rover ujel 456 metrů (1496 stop) na dva separátní dny, přičemž běžné manuální waypoints jsou omezeny na maximálně 100 metrů.
- Zpoždění komunikace mezi Zemí a Marsem činí přibližně 25 minut pro zpáteční signál.
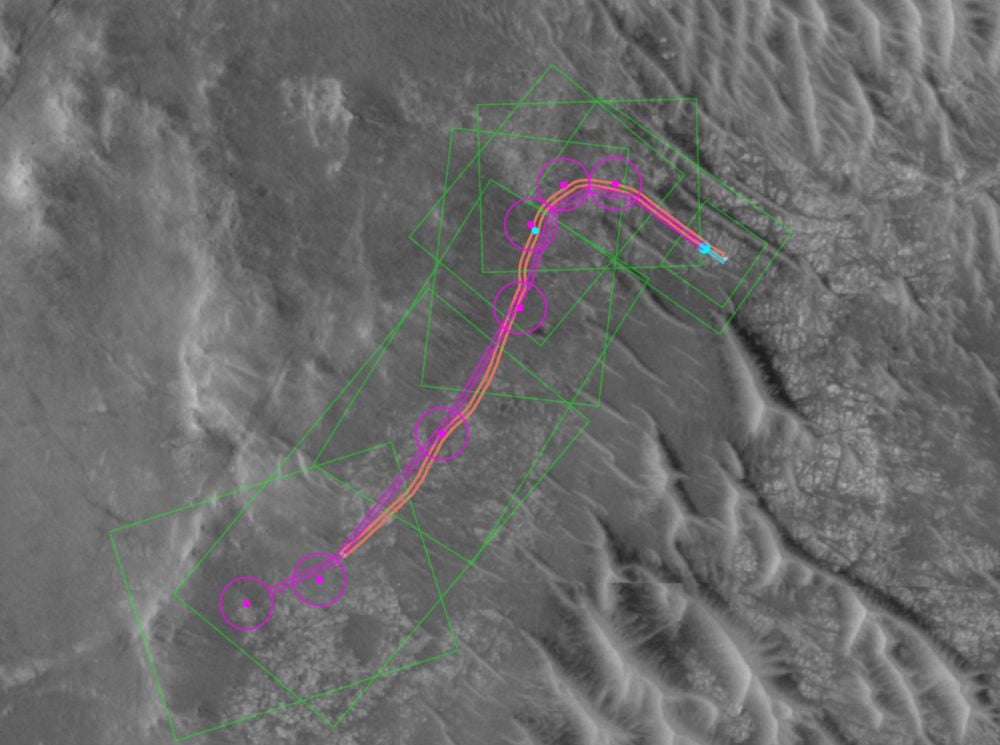
- Test proběhl 10. prosince 2025, s magenta čarou pro plánovanou trasu a oranžovou pro skutečnou v anotovaném orbitálním snímku.
- Jared Isaacman, administrátor NASA, zdůraznil efektivitu a odpovědnost při nasazování takových technologií.
Podrobnosti
Rover Perseverance, který přistál na Marsu v únoru 2021, slouží k průzkumu kráteru Jezero a sběru vzorků pro budoucí návrat na Zemi. Běžný proces plánování trasy zahrnuje operátory na Zemi, kteří studují snímky a data o nadmořské výšce, definují řadu trasových bodů (waypoints) vzdálených maximálně 100 metrů a odesílají plán přes Deep Space Network (DSN) NASA. Signál je relayován orbitálními sondami, případně přímo z DSN s nižší rychlostí dat.
V tomto testu AI nahradilo lidské plánování. Model založený na Claude AI od Anthropic, firmy specializující se na vývoj velkých jazykových modelů (LLM) s důrazem na bezpečnost, analyzoval vysoce detailní snímky z HiRISE – kamery na Mars Reconnaissance Orbiter, která poskytuje rozlišení až 25 centimetrů na pixel. AI identifikovalo potenciální nebezpečí (hazards), jako jsou kameny nebo svahy, a navrhlo bezpečnou trasu. Na druhý den testu, 10. prosince 2025, magenta čára na anotovaném snímku znázorňuje AI-plánovanou cestu, zatímco oranžová ukazuje reálnou dráhu roveru, která se od ní mírně lišila kvůli lokálním podmínkám.
Tento přístup řeší klíčový problém: komunikační zpoždění 25 minut brání real-time řízení. Rovery tak musí být autonomní po dobu mezi příkazy. AI zkracuje cyklus plánování z dnů na hodiny a umožňuje delší vzdálenosti na jízdu. Perseverance, vybavený senzory jako navigacečním systémem AutoNav, dosud jezdil autonomně mezi waypoints, ale generování těchto bodů bylo dosud manuální. Nasazení Claude-based AI představuje první takovou aplikaci v reálné operaci na Marsu, kde LLM slouží k vizuální analýze a rozhodování o cestě.
Proč je to důležité
Tento pokrok posiluje autonomii v robotice pro vesmírné mise, kde vzdálenosti od Země rostou – například pro plánované mise na Jupiterovy měsíce nebo saturnovské měsíce, kde zpoždění dosáhne hodin. Pro průmysl znamená, že AI modely jako Claude lze integrovat do edge computingu na roverech, zvyšujíc efektivitu sběru dat a minimalizujíc rizika. V širším kontextu ukazuje, jak LLM přecházejí z textového zpracování k vizuálnímu plánování v robotice, což ovlivní autonomní vozidla na Zemi (jako Tesla FSD nebo Waymo). NASA tak demonstruje odpovědné nasazení AI v kritických prostředích, kde chyba může znamenat ztrátu miliónů dolarů. Očekává se, že podobné systémy prodlouží životnost roverů a zvýší vědecký výnos tím, že umožní průzkum terénů dříve nepřístupných.
Zdroj: 📰 Universe Today