Souhrn
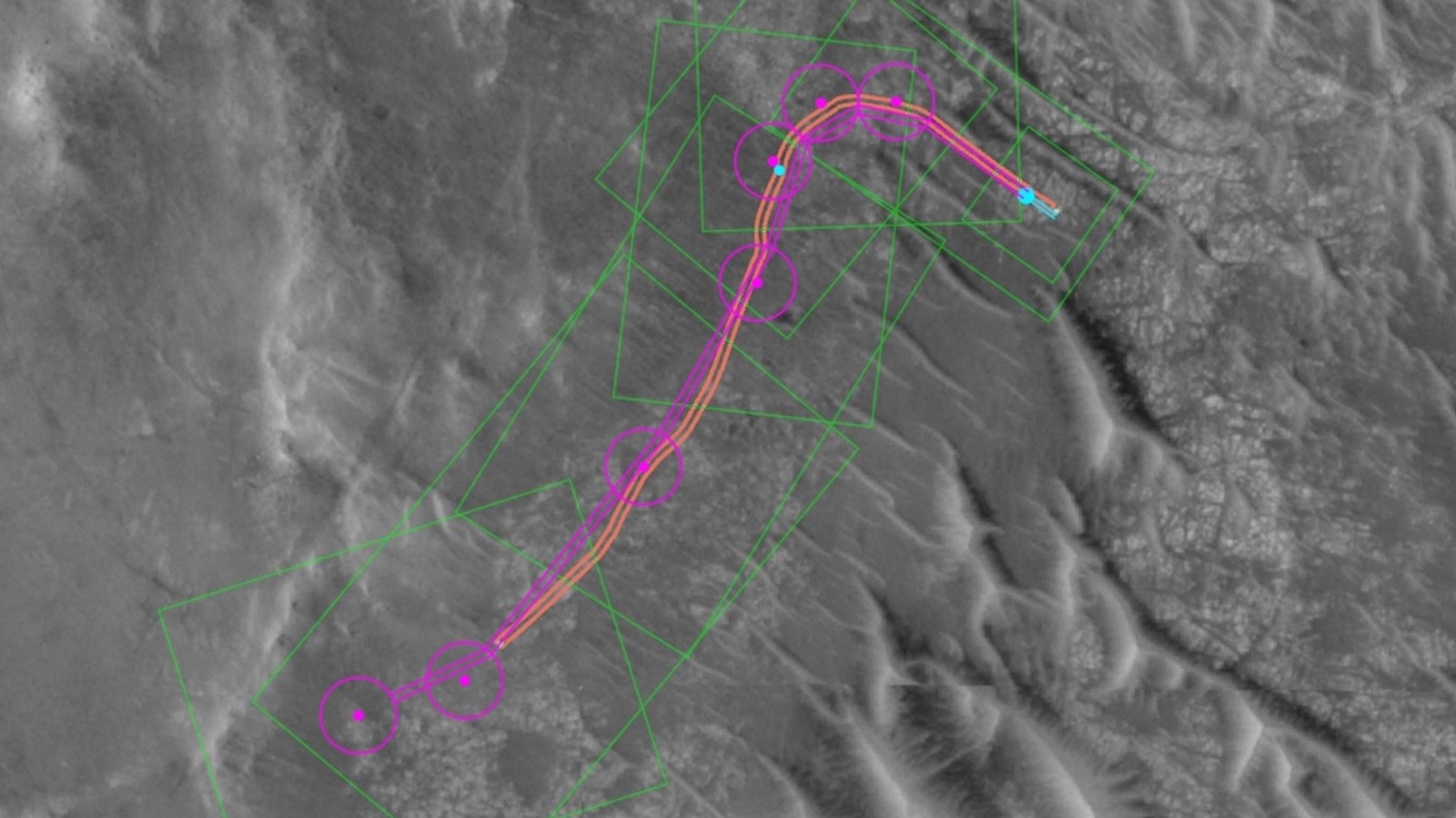
Marťanský rover Perseverance od NASA poprvé dokončil dvě jízdy, jejichž trasy byly naplánovány umělou inteligencí místo lidskými specialisty. Experiment proběhl 8. a 10. prosince pod vedením Jet Propulsion Laboratory (JPL) v Kalifornii, kde generativní AI model Claude od společnosti Anthropic vygeneroval waypoints na základě dostupných dat o terénu. Rover trasu úspěšně projel bez kolizí nebo jiných problémů.
Klíčové body
- První použití generativní AI pro plánování roverových jízd na jiném světě.
- Model Claude analyzoval fotografie a data o povrchu Marsu k vytvoření bezpečných tras.
- Nejde o plně autonomní jízdu, ale o složité rozhodování při tvorbě cesty z bodu A do B.
- Tradiční rizika jako náraz do balvanu, převržení nebo uvíznutí v písku byla minimalizována.
- Komunikační zpoždění mezi Zemí a Marsem (4–24 minut) znemožňuje dálkové ovládání v reálném čase.
Podrobnosti
Rover Perseverance, který stojí 2,7 miliardy dolarů, je navržen pro dlouhodobý výzkum povrchu Marsu v oblasti kráteru Jezero. Dosud byly trasy plánovány manuálně: lidští plánovači z JPL pečlivě studovali stereoskopické fotografie, mapy reliéfu a další data z roverových senzorů, aby určili optimální cestu. Tento proces trvá hodiny až dny a je nutný kvůli komunikačnímu zpoždění – rádiové signály putují rychlostí světla, což znamená jednosměrné zpoždění 4 až 24 minut v závislosti na poloze planet. Přímé dálkové ovládání by bylo nemožné, proto se rovery spoléhají na předem nahrané instrukce.
V tomto experimentu JPL nahradilo manuální plánování modelem Claude, což je velký jazykový model (LLM) od Anthropic, firmy zaměřené na bezpečnou vývoj AI. Claude byl nakrmen daty o terénu a vygeneroval sadu waypoints – souřadnice klíčových bodů trasy. NASA neaplikovala trasu naslepo; plán byl následně ověřen lidmi a roverovými senzory před i během jízdy. Perseverance již disponuje pokročilou autonomní navigací (Terrain Relative Navigation), která umožňuje vyhýbat se překážkám během jízdy rychlostí až 0,2 m/s, ale plánování celkové trasy zůstávalo lidskou doménou.
Tento přístup ukazuje, jak generativní AI dokáže zpracovávat komplexní prostorové data a simulovat rozhodování experta. Claude slouží k generování textových i strukturovaných výstupů, jako jsou souřadnice, na základě popisu úlohy. Nicméně, jako u všech LLM, existují rizika halucinací – nesprávných výstupů – což JPL řešilo vícefázovou validací. Historicky rovery jako Spirit uvízly v píscích kvůli špatnému plánování, což zdůrazňuje důležitost přesnosti.
Proč je to důležité
Tento úspěch představuje klíčový krok v integraci AI do vesmírné robotiky, kde je autonomie nezbytná pro mise mimo dosah rychlé komunikace. Pro NASA znamená zkrácení doby plánování z dní na hodiny, což umožní více vědeckých dat a delší operační dobu roveru. V širším kontextu posiluje důvěru v LLM pro kritické aplikace mimo laboratoře – od robotiky na Zemi po budoucí mise na Měsíc nebo satelity. Anthropic tak demonstruje praktické nasazení Claude v reálném světě, což může urychlit adopci AI v průmyslových a vědeckých provozech. Kriticky však zůstává závislost na lidské kontrole, aby se zabránilo chybám, které by mohly ohrozit miliardové investice. Tento vývoj nastavuje precedens pro autonomní systémy v extrémních prostředích, jako jsou hlubokomořské roboty nebo drony v katastrofách.
Zdroj: 📰 Jalopnik